We secured second positiion in the seventh edition of the National Aerospace Conceptual Design Competition (NACDeC) organised in collaboration with ISRO.
Problem Definition
The team's objective for this competition was to develop and propose a fully-fledged conceptual UAV for the planetary boundary layer (PBL) study of the lower stratum of the Martian atmosphere while maximising the number of sorties in a sol. The region of study for the proposed UAV would be the roughness layer corresponding to the initial 100 m above the Martian surface.
The Team
The team comprised of five students from the Aeronautical Engineering Department, Batch of 2025, at the Manipal Institute of Technology, Manipal, Karnataka, India. Pictured from left to right in the first image are Vedant Vijaykrishnan, Pranav Karkera, Aditya Singh, Kanak Agarwal, and Parth Jain.




Configuration Chosen
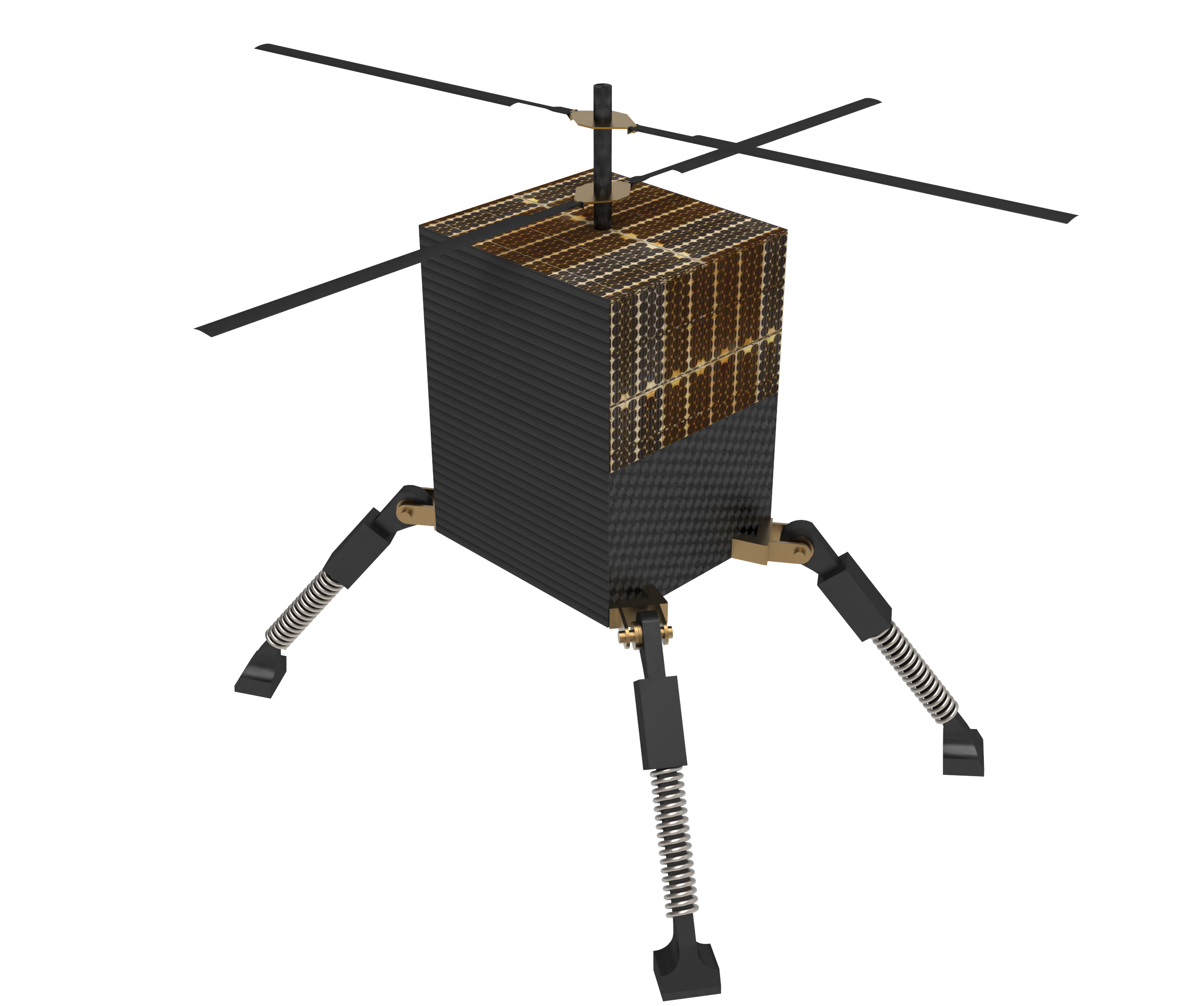
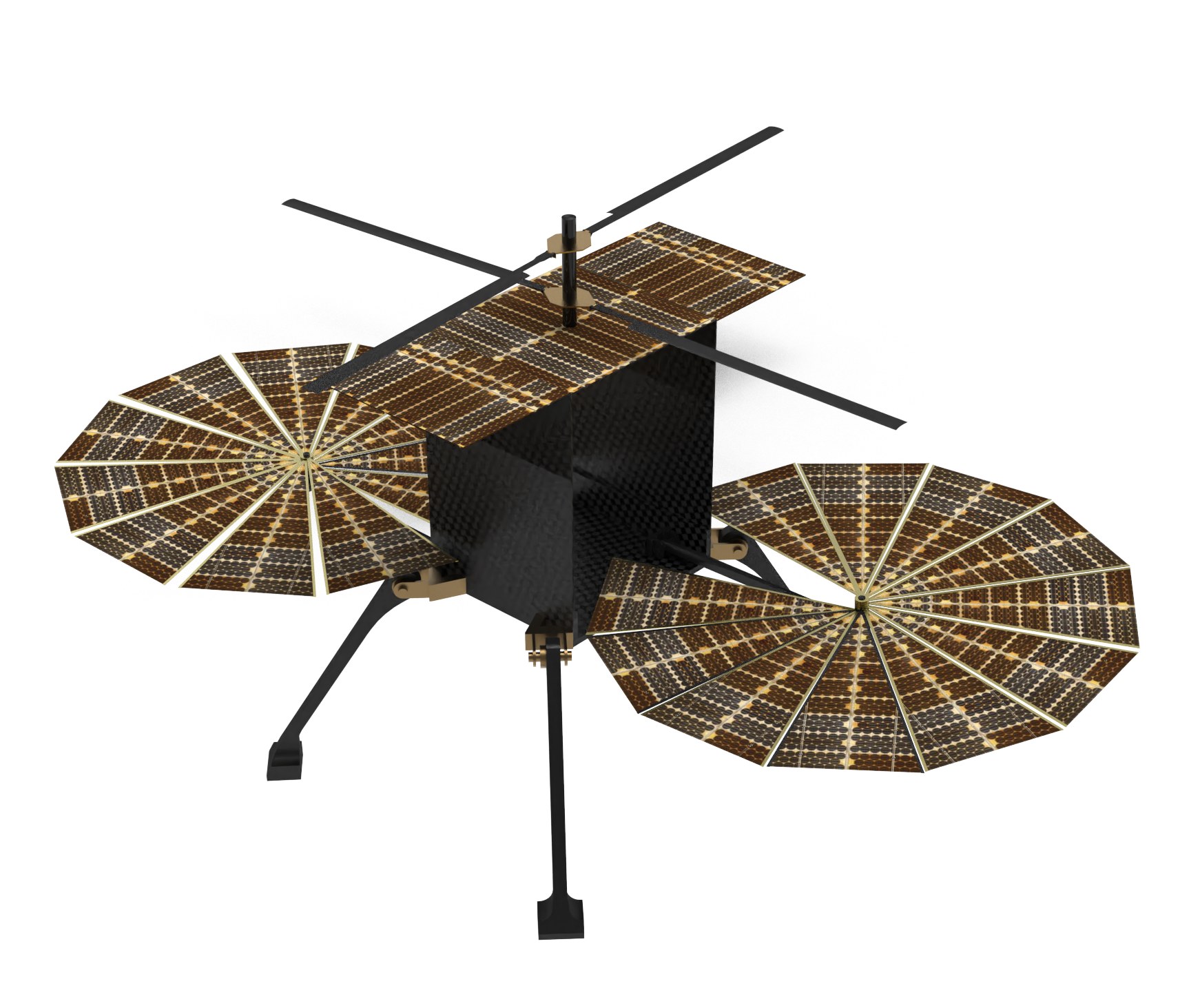
The coaxial configuration features a single motor with two rotors mounted on a concentric shaft, with the propellers turning in opposite directions to produce an effective zero torque. For a similar radius, a coaxial system produces considerably more thrust than a conventional helicopter configuration. Coaxial UAVs, in general, tend to be more compact (desirable while considering stowage) and can carry more payload for the same engine power. The disk loading (Thrust/Rotor Area) is a significant parameter for VTOL aircraft. The low disk loading obtained in the coaxial configuration makes it ideal for efficient hover and rotor thrust utilisation. Furthermore, since the Martian atmosphere often experiences strong dust storms, the enhanced stability that the coaxial configuration provides in cross-wind conditions will be highly desirable. These advantageous features led to the selection of coaxial rotor system. The figures below show the UAV with the solar panels both deployed (during charging) and stowed (during flight).
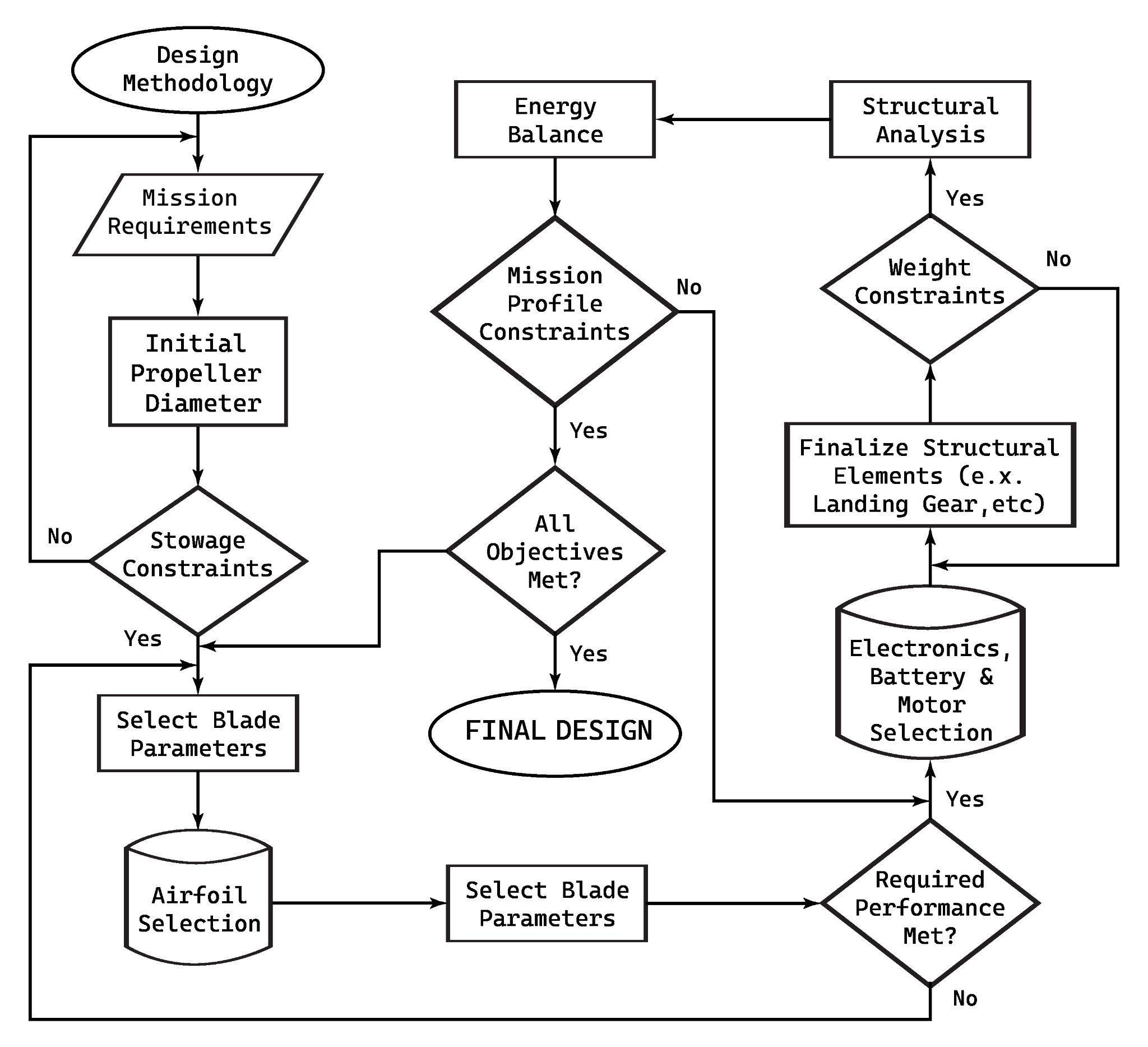
Design Methodology
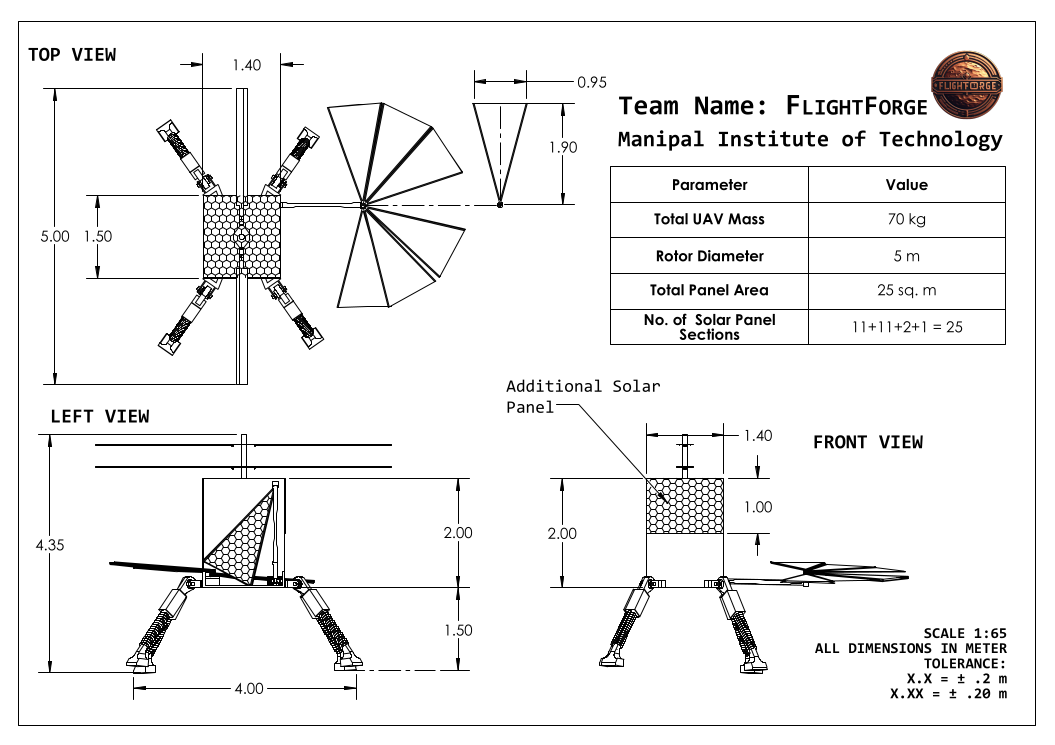
Planform Drawing of the UAV
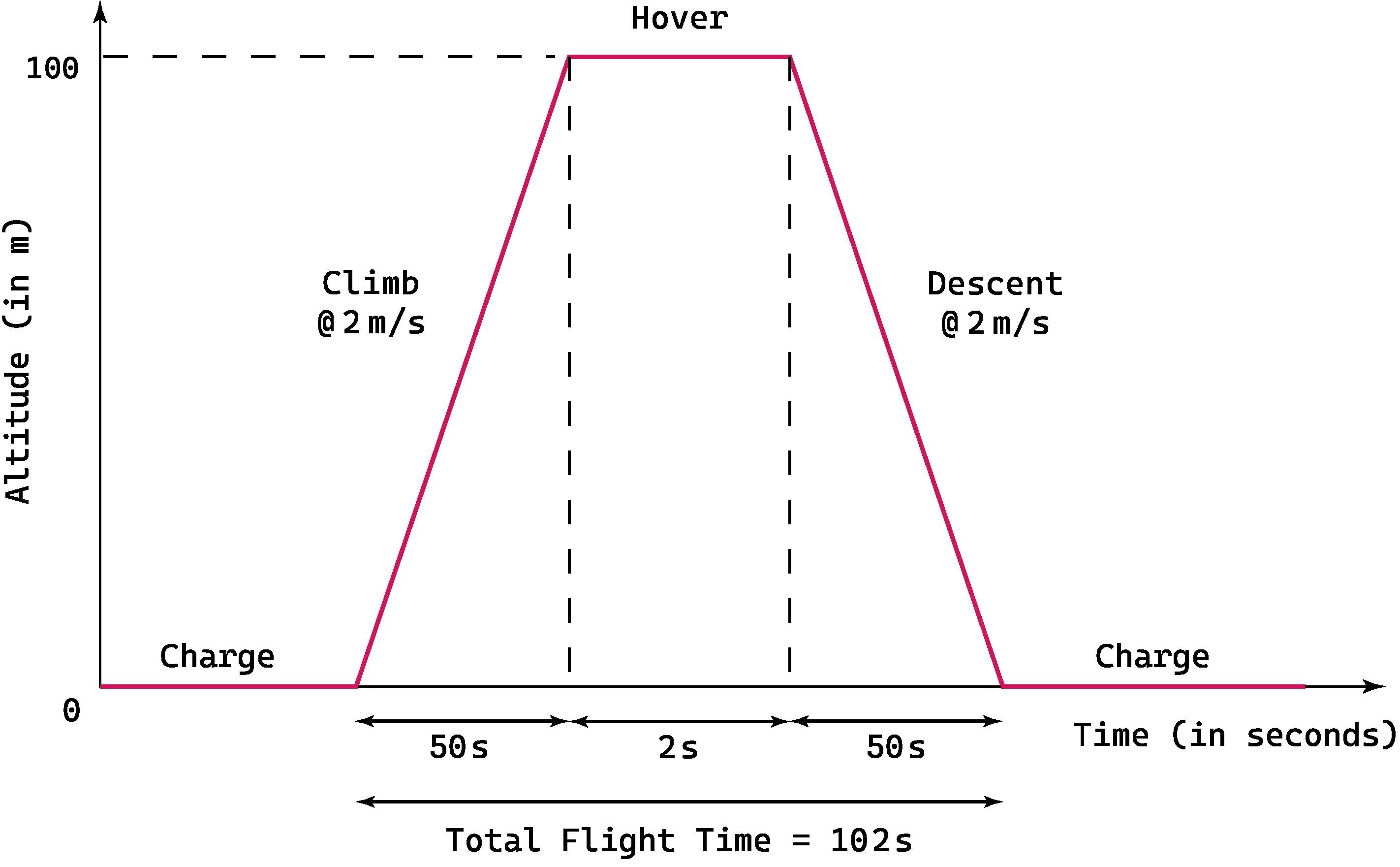
Final Mission Profile of the UAV
Certificate
